工业以太网EtherCAT技术原理与网络技术开发实现
工业以太网EtherCAT(以太网控制自动化技术)是一种高性能、实时性的工业通信协议,其设计目标是在标准以太网物理层上实现高速、精确的分布式控制。EtherCAT技术的核心原理与实现方式,为现代工业自动化系统的网络技术开发提供了强大支撑。
一、EtherCAT技术基本原理
1. 实时通信机制:
EtherCAT采用“主从”架构,主站发送以太网帧,从站设备在数据帧经过时实时读取或插入数据,实现“在线处理”。数据帧不被每个从站接收并重新组帧,而是以极小的延迟(通常小于1微秒)通过所有节点,大幅提升了通信效率。
2. 分布式时钟同步:
EtherCAT通过精确的分布式时钟机制,确保所有从站设备的时间同步精度可达纳秒级。主站定期发送同步信号,各从站根据参考时钟调整本地时钟,从而支持高精度协同控制,如多轴运动控制。
3. 灵活的数据处理:
数据帧包含多个子报文,每个子报文对应特定从站或数据区。从站通过硬件实现数据提取与插入,无需CPU干预,减少了处理延迟,并支持多种数据类型和协议(如CANopen、PROFIBUS)的集成。
二、EtherCAT网络技术开发实现
- 硬件平台设计:
- 主站开发:通常基于工业PC或嵌入式系统,配备支持EtherCAT的网卡(如Intel千兆网卡搭配专用驱动)。主站软件可采用开源栈(如SOEM)或商业栈(如Beckhoff TwinCAT),实现配置、诊断及实时任务调度。
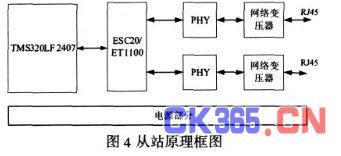
- 从站开发:从站设备需集成EtherCAT从站控制器(ESC),如ASIC芯片(如ET1100)或FPGA方案。ESC处理数据帧的物理层与数据链路层操作,确保实时性。开发者需设计硬件接口(如数字I/O、模拟量模块)并与ESC集成。
- 软件栈与协议栈开发:
- 主站软件栈:实现EtherCAT主站协议,包括状态机管理(Init、Pre-Operational、Safe-Operational、Operational)、邮箱通信(用于非实时参数配置)和过程数据交换(PDO)。开发中需优化实时线程,以满足循环周期(通常为100μs–10ms)要求。
- 从站固件开发:基于ESC配置工具(如Beckhoff ESI文件),定义从站信息与数据映射。固件需实现应用层对象字典(遵循CoE规范),支持SDO(服务数据对象)访问和PDO同步。
- 网络配置与诊断工具:
- 使用XML格式的ESI(EtherCAT从站信息)文件描述从站功能,主站通过ENI(EtherCAT网络信息)文件初始化网络拓扑。
- 开发诊断工具监控网络状态,如链路质量、同步误差及从站报警,利用EtherCAT的“工作计数器”机制检测数据帧完整性。
- 实时性与性能优化:
- 采用实时操作系统(如Linux with PREEMPT_RT、Windows RTX)或专用实时内核,确保主站周期任务的确定性。
- 优化数据帧结构,减少冗余子报文,利用EtherCAT的“飞读飞写”特性最大化带宽利用率(千兆以太网下可达90%以上)。
三、应用场景与开发挑战
EtherCAT广泛应用于运动控制、机器人、包装机械等高精度领域。开发中需应对硬件成本、拓扑灵活性(支持线型、树型或星型)及异构网络集成等挑战。随着TSN(时间敏感网络)技术的发展,EtherCAT over TSN将进一步增强其实时性与兼容性。
EtherCAT通过创新的实时以太网原理,结合模块化的开发实现,为工业网络技术提供了高效、可靠的解决方案。开发者需深入理解其协议栈与硬件协同设计,以充分发挥其在高速控制场景中的潜力。
如若转载,请注明出处:http://www.lanhengkeji.com/product/59.html
更新时间:2026-02-28 00:14:26